





Описание



Упаковка, они могут быть высланыВключая: 1 шт.Мотор + Встроенный редуктор + Драйвер
1. Не могли бы вы 通信 (SmartCan 协议, 速率 1 м);
Связь может, (Протокол SmartCan, скорость 1 м);
2. 15 мм 位绝对编码器, 一圈脉冲高达 32768
15 бит абсолютного энкодера, один круг импульса может до 32768.
3. 多极 DD 马达结构, 大扭力输出 。
Многополюсный двигатель DD с высоким крутящим моментом.
4. 一体化伺服, 简化接线, 体积超小 。
Интегрированный мотор sevro с размером samll и легко подключаемыми проводами.
5. 位置控制模式, 可设置速度, 加速度
Шаблон управления позицией, вы можете установить скорость и ускорение
型号参数 Описание продукта
电源 电压 (Напряжение) 36VDC±10%
Питание 电流 (ток) 7A
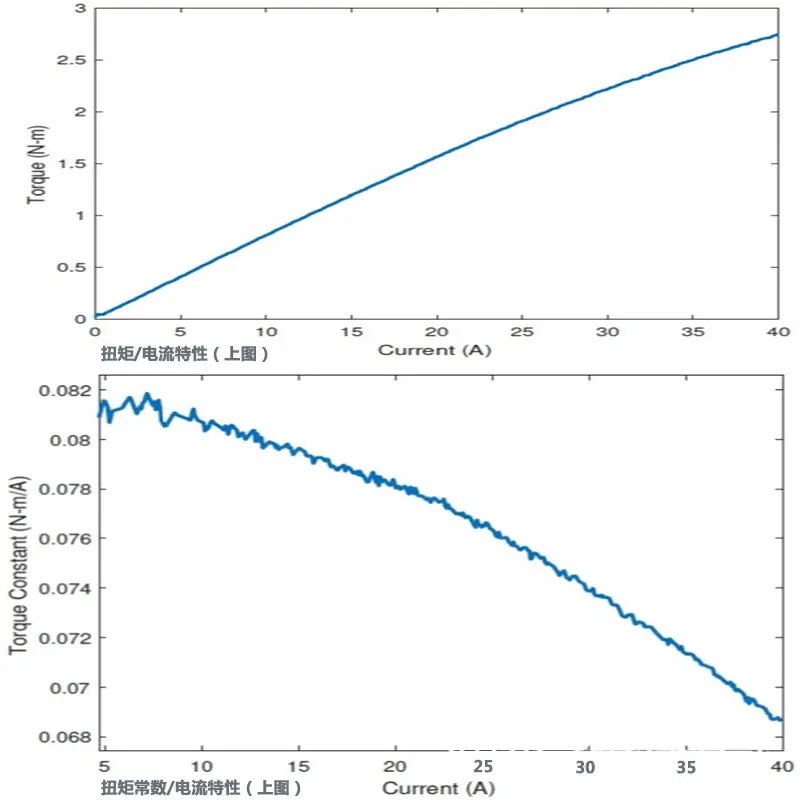
电机参数 扭矩 (крутящий момент) 1.27NM
Детали 额定转速 (Номинальная частота вращения) 1500 об/мин
最大转速 (максимальная скорость) 2000 об/мин
功率 (Мощность) 200 W
反馈信号 (сигнала отзывы) 15 位绝对编码器, 一圈脉冲高达 32768 (один круг 15bit абсолютное
Кодировщик, один круг импульса может до 32768)
冷却方式 (режим охлаждения) 自然冷却 (естественное охлаждение)
重量 (Вес) 480 г
位 置 控 制 模 式 位置采样频率
Частота дискретизации положения 2 кГц
Управление узор
保护功能 (по охране окружающей среды) 堵转报警 (подключение ротора предупреждение)
通信接口 (Связь интерфейс) Smartcan (может 通信, 速率 1 м) Smartcan (протокол CAN, уровень 1 м)
使用环境 环境温度 температура окружающей среды 0 ~ 40 °
Защита окружающей среды 电机允许最高温度 85℃
Максимальная температура двигателя
湿度 влажность 5 ~ 95%
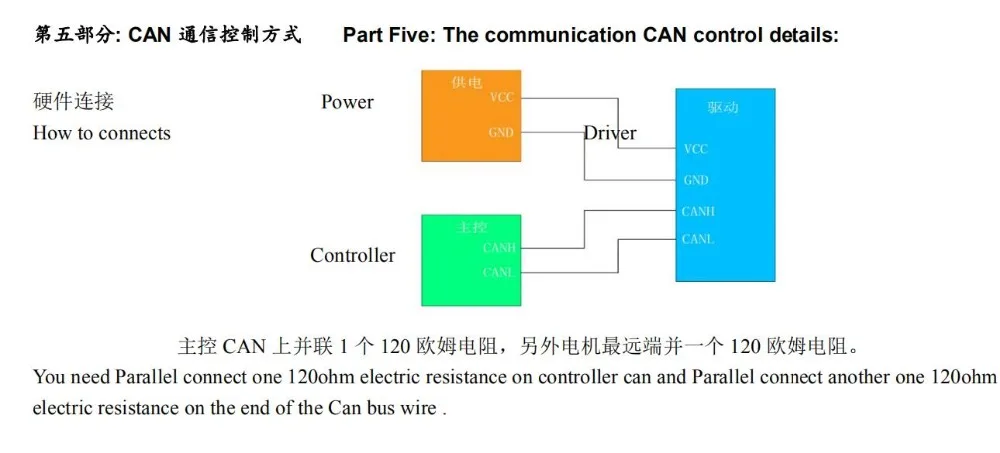
第五部分: Можем ли通信控制方式Часть пятая: связь может контролировать детали:
硬件连接 Мощность
Как подключается драйвер
Контроллер
主控 может 上并联 1 个 120 欧姆电阻, 另外电机最远端并一个 120 欧姆电阻 。
Вам нужно параллельное соединение одного электрического сопротивления 120 Ом на контроллере и параллельное соединение другого 120 Ом
Электрическое сопротивление на конце провода Can-шины.
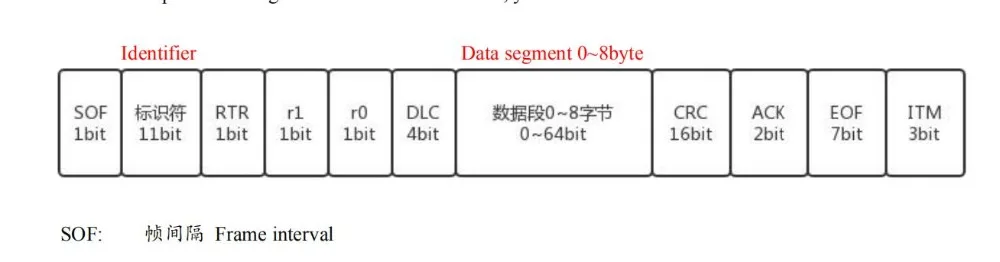
SmartCan 通信格式 сообщение формат
SmarCan 通信协议采用数据帧标准格式, 数据帧格式如下图所示:
Протокол SmartCan comm с использованием стандартного формата рамки данных, вы можете найти его следующим образом:
Идентификатор сегмент данных 0 ~ 8 байт

SOF: 帧间隔 интервал кадра
标识符: 范围 0 ~ 255, 表示目标设备的地址 。 主机发数据给从机, 标识符即为从机地址 。 从机发数据给主机,
标识符即为主机地址 。
Знак: диапазон 0 ~ 255, представляет адрес оконечного устройства, хост отправляет данные в раб, идентификатор-раб
Адрес, если раб отправляет deta на хост, идентификатором является адрес хоста.
Группа RTR состоит из: 0: 数据帧 。 (1: 远程帧) 。 SmartCan 只使用数据帧 。
0: рамка данных. (1: Удаленная рамка). SmartCan просто использует рамку данных.
R1 в режиме ожидания: 0: 标准标识符 。 (1: 扩展标识符) 。 SmartCan 只使用标准标识符 。
0: Стандартный идентификатор. (1: Расширенный идентификатор). SmartCan просто использует стандартный идентификатор.
R0: 接收位 。
Получение бит.
DLC: 数据长度代码 。
Данные Длина код.
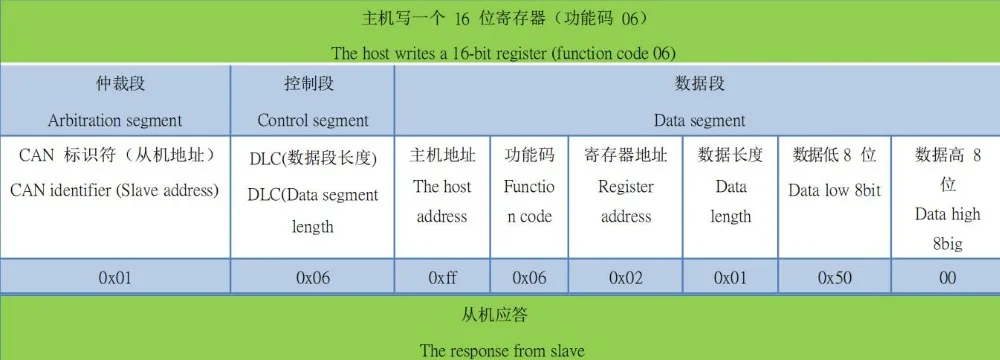
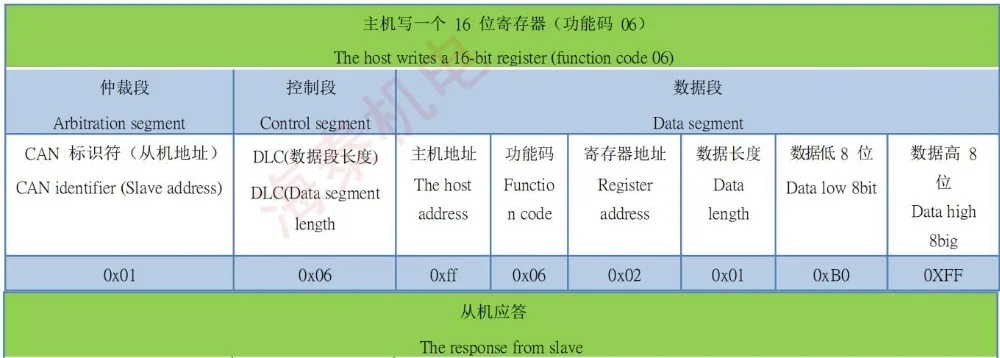
数据段: 具体协议参看后面表格 。
Сегмент данных: пожалуйста, найдите протокол в следующей таблице doc.

















Упаковка, они могут быть высланыВключая: 1 шт.Мотор + Встроенный редуктор + Драйвер

Мы продаем 1 шт. мотор + Встроенный редуктор + драйвер, не все вещи
Если вы хотите узнать больше информации, вы можете перейти в google дляМини сатиновая юбка-американка
Https://news.mit.edu/2019/mit-mini-cheetah-first-four-legged-robot-to-backflip-0304
Мини-Гепард, последний дроид MIT гораздо сложнее, чем роботы, которые вы видите до сих пор. Мы виделись, как они открываются и удерживают двери, и мы виделись, как они избегают препятствий. Тем не менее, мини-Гепард обыграл их всех с его возможностью выполнить обратную сальто











Характеристики
- Бренд
- cgcxft
- Материал
- Composite Material
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Детали дистанционного управления и комплектующие
- Motors
Сопутствующие товары







